Smart LoRa Board – Heltec Esp32 + Nano
สวัสดีครับ ขอแนะนำน้องใหม่ของเราวันนี้ SMT-001-Ver 2021
รุ่นนี้เป็นการต่อยอดจากรุ่นก่อน โดยมีการเปลี่ยนโฉม ปรับลดดังนี้
เปลี่ยนจาก Wemos D1R1 เป็น Heltec LoRa esp32 –> เพื่อวัดใจคนอยากได้การส่งจากฟาร์มแบบไกลๆ ห่างจากบ้านราวซักกิโลเมตร ให้ส่งมาหา Gateway LoRa-WiFi แล้วส่งไปยัง Server อีกที
นอกจากนี้ หากมี WiFi ใกล้ๆ ก็เลือกที่จะส่งเป็น WiFi กันได้เลย ก็ดัดแปลงโค้ดกันเล็กน้อย
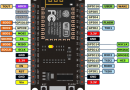
มาดูองค์ประกอบบนบอร์ดกันดีกว่า
- Heltec LoRa esp32 ตามที่กล่าวแล้ว
- Arduino Nano ที่เอาไว้วัดพวก Analog ต่างๆ รวมทั้งวัด I2C
- Port I2C ที่จะวิ่งเข้า Nao
- Port I2C สำรองที่ต่อเข้า Heltec LoRa 32
- IO-RS485 ที่ต่อเข้ายัง heltec LoRa
- Terminal Vac-220
- Terminal 12 Vdc -> สำหรับการรับไฟฟ้าจาก Solar Cell
- Relay 4 ชุด ลดลงจากเดิม 2 ตัว ทั้งนี้เพื่อให้เหบือ IO สำหรับการใช้งาน Interrupt ซึ่งหากใครจะไม่ใช้ และเอาไปต่อขับ Relay ก็ยังใช้การได้เต็มที่เช่นเดิม

ผลการทดสอบเป็นไปได้ด้วยดี พร้อมทดสอบโค่ดทั้ง 2 Mode ได้ผลดีเยี่ยม
มาลองดูโค้ดกัน นี่เอาแบบยังไม่ปรับปรุงงกันเลย เอาแค่ work ก่อน
/*
Code file name : MiniLoRa-Nano-Node-Dev-184...Trial Seria
This is a simple example show the Heltec.LoRa sended data in OLED.
The onboard OLED display is SSD1306 driver and I2C interface. In order to make the
OLED correctly operation, you should output a high-low-high(1-0-1) signal by soft-
ware to OLED's reset pin, the low-level signal at least 5ms.
OLED pins to ESP32 GPIOs via this connecthin:
OLED_SDA -- GPIO4
OLED_SCL -- GPIO15
OLED_RST -- GPIO16
by Aaron.Lee from HelTec AutoMation, ChengDu, China
成都惠利特自动化科技有限公司
www.heltec.cn
this project also realess in GitHub:
https://github.com/Heltec-Aaron-Lee/WiFi_Kit_series
*/
#include "ModbusMaster.h" //https://github.com/4-20ma/ModbusMaster
/*!
We're using a MAX485-compatible RS485 Transceiver.
Rx/Tx is hooked up to the hardware serial port at 'Serial'.
The Data Enable (DE) and Receiver Enable (RE) pins are hooked up as follows:
*/
#include <Arduino.h>
#include <Wire.h>
#include <math.h>
#include <ArduinoJson.h>
//=========
#include <WiFi.h>
//======
#define RXX 17
#define TXX 13
#include <Adafruit_Sensor.h>
#include <DHT.h> // กรณีนี้ต้องใช้คู่กันกับ DHT_U.h
#include <DHT_U.h>
#define DHTPIN 12 // Pin which is connected to the DHT sensor.
//#define DHTTYPE DHT22 // DHT 22 (AM2302)
#define DHTTYPE DHT21 // DHT 21 (AM2301)
// See guide for details on sensor wiring and usage:
// https://learn.adafruit.com/dht/overview
DHT_Unified dht(DHTPIN, DHTTYPE);
uint32_t delayMS;
#define MAX485_RE_NEG 25 //D4 RS485 has a enable/disable pin to transmit or receive data. Arduino Digital Pin 2 = Rx/Tx 'Enable'; High to Transmit, Low to Receive
#define Slave_ID1 1 // see dip swith if connect to Transpower
#define RX_PIN 22 //RX2 22 do not change
#define TX_PIN 23 //TX2 23 do not change
#include "heltec.h"
#include "images.h"
#define BAND 915E6 //you can set band here directly,e.g. 868E6,915E6,433E6
// instantiate ModbusMaster object
ModbusMaster modbus;
double res_dbl0;
double res_dbl1;
double res_dbl ;
unsigned int counter = 0;
String rssi = "RSSI --";
String packSize = "--";
String packet ;
//======
//====
const char* ssid = "xxxxxxxxal2019_2.4G";
const char* password = "kbxxxxxxx12";
//const char* ssid = "dlink_DWR-932C_0C4E";
//const char* password = "gkyVD35784";
//const char* ssid = "AndroidAP-J7";
//const char* password = "braw5645";
//const char* ssid = "true_home2G_F78";
//const char* password = "96104427";
const char* host = "otrixiot.com";
float temp_0 = 0;
float humid_0 = 0;
float vHumidity = 0;
float vTemperature = 0;
//=======================
String datasend ;
String datasend1 ;
String datasend2 ;
String data2 ;
String data3 ;
String data4 ;
String data5 ;
String data6 ;
String data7 ;
String data8 ;
String data9 ;
String a ;
float data10=33;
float data11=33;
float data12=33;
float data13=33;
float data14=33;
float data15=33;
float data16=33;
float data17=33;
float data18=33;
float data19=33;
float data20=33;
/// ===
//float temp_0 = 0;
//float humid_0 = 0;
//float vHumidity = 0;
//float vTemperature = 0;
String data1="xxx";
String iddevice = "xxx";
String cccode = "xxxxxx";
String ccode = "xxxxxxx";
long lastMillis = 100;
/// ===
String sentpacket ;
String str;
char charBuf[100];
// Convent 32bit to float
//------------------------------------------------
float HexTofloat(uint32_t x)
{
return (*(float*)&x);
}
uint32_t FloatTohex(float x)
{
return (*(uint32_t*)&x);
}
//------------------------------------------------
//===
void preTransmission()
{
digitalWrite(MAX485_RE_NEG, HIGH); //Switch to transmit data
}
void postTransmission()
{
digitalWrite(MAX485_RE_NEG, LOW); //Switch to receive data
}
//====
void logo()
{
Heltec.display->clear();
Heltec.display->drawXbm(0,5,logo_width,logo_height,logo_bits);
Heltec.display->display();
}
void AM2301_setup() {
Serial.begin(9600);
// Initialize device.
dht.begin();
Serial.println("DHTxx Unified Sensor Example");
// Print temperature sensor details.
sensor_t sensor;
dht.temperature().getSensor(&sensor);
Serial.println("------------------------------------");
Serial.println("Temperature");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" *C");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" *C");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" *C");
Serial.println("------------------------------------");
// Print humidity sensor details.
dht.humidity().getSensor(&sensor);
Serial.println("------------------------------------");
Serial.println("Humidity");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println("%");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println("%");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println("%");
Serial.println("------------------------------------");
// Set delay between sensor readings based on sensor details.
delayMS = sensor.min_delay / 1000;
}
void RS485_setup()
{
pinMode(MAX485_RE_NEG, OUTPUT);
// Init in receive mode
digitalWrite(MAX485_RE_NEG, LOW);
// Modbus communication runs at 9600 baud
Serial.begin(9600, SERIAL_8N1);
Serial1.begin(9600, SERIAL_8N1, RX_PIN, TX_PIN); // serial can be no1 , no 2 8N1
modbus.begin(Slave_ID1, Serial1);
// Callbacks allow us to configure the RS485 transceiver correctly
modbus.preTransmission(preTransmission);
modbus.postTransmission(postTransmission);
}
/// for gateway
/*
void LoRaData(){
Heltec.display->clear();
Heltec.display->setTextAlignment(TEXT_ALIGN_LEFT);
Heltec.display->setFont(ArialMT_Plain_10);
Heltec.display->drawString(0 , 15 , "Received "+ packSize + " bytes");
Heltec.display->drawStringMaxWidth(0 , 26 , 128, packet);
Heltec.display->drawString(0, 0, rssi);
Heltec.display->display();
}
*/
/*
void cbk(int packetSize) {
packet ="";
packSize = String(packetSize,DEC);
for (int i = 0; i < packetSize; i++) { packet += (char) LoRa.read(); }
rssi = "RSSI " + String(LoRa.packetRssi(), DEC) ;
LoRaData();
//sentpacket =packet;
}
*/
/// for gateway
void WiFiForwardSetup()
{
Serial.begin(115200);
delay(10);
// We start by connecting to a WiFi network
Serial.println();
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
}
void setup()
{
//WIFI Kit series V1 not support Vext control
WiFiForwardSetup();
Heltec.begin(true /*DisplayEnable Enable*/, true /*Heltec.Heltec.Heltec.LoRa Disable*/, true /*Serial Enable*/, true /*PABOOST Enable*/, BAND /*long BAND*/);
Heltec.display->init();
Heltec.display->flipScreenVertically();
Heltec.display->setFont(ArialMT_Plain_10);
logo();
delay(1500);
Heltec.display->clear();
Heltec.display->drawString(0, 0, "Heltec.LoRa Initial success!");
Heltec.display->display();
delay(1000);
RS485_setup();
//AM2301_setup();
Serial2.begin(9600, SERIAL_8N1,17,13); // สำคัญเลย กำหนด Serial ที่ 3 ของบอร์ด
//LoRa.onReceive(cbk);
//LoRa.receive();
}
void loop()
{
/*
RS485_loop();
datasend2 = String(res_dbl0)+","+String(res_dbl1)+","+String(45.00)+","+String(25.75)+","+String(100.05);
datasend1 = String(cccode)+","+String(177)+","+String(res_dbl0)+","+String(res_dbl1);
datasend = datasend1+","+datasend2;
*/
Heltec.display->clear();
Heltec.display->setTextAlignment(TEXT_ALIGN_LEFT);
Heltec.display->setFont(ArialMT_Plain_10);
Heltec.display->drawString(0, 0, "Samong IOT Data packet: ");
Heltec.display->drawString(0, 10, String(counter));
Heltec.display->drawString(0,20, String(datasend1));
Heltec.display->drawString(0,30, String(datasend2));
Heltec.display->display();
counter=counter+1;
// send packet
LoRa.beginPacket();
/*
* LoRa.setTxPower(txPower,RFOUT_pin);
* txPower -- 0 ~ 20
* RFOUT_pin could be RF_PACONFIG_PASELECT_PABOOST or RF_PACONFIG_PASELECT_RFO
* - RF_PACONFIG_PASELECT_PABOOST -- LoRa single output via PABOOST, maximum output 20dBm
* - RF_PACONFIG_PASELECT_RFO -- LoRa single output via RFO_HF / RFO_LF, maximum output 14dBm
*/
/*
LoRa.setTxPower(14,RF_PACONFIG_PASELECT_PABOOST);
LoRa.print(datasend);
//LoRa.print(counter);
LoRa.endPacket();
*/
RS485_loop1();
delay(2000);
//AM2301_loop();
/*
data2 = "22.22";
data3 = "33.33";
data4 = "44.44";
data5 = "55.55";
data6 = "66.66";
data7 = "77.77";
*/
Forward_loop();
datasend2 = String(data4)+","+String(data5)+","+String(data6)+","+String(data7);
datasend1 = String(cccode)+","+String(data1)+","+String(data2)+","+String(data3);
datasend = datasend1+","+datasend2;
Serial.println(datasend);
LoRa.setTxPower(14,RF_PACONFIG_PASELECT_PABOOST);
LoRa.print(datasend);
//LoRa.print(counter);
LoRa.endPacket();
LoRa.print(counter);
delay(2000); // wait for a second
serial_loop(); // remove comment if to connect serial
}
// RS485 loop
void RS485_loop1()
{
long currentMillis = millis();
if (currentMillis - lastMillis > 1000)
{
float result = modbus.readHoldingRegisters(0x11,20); // 0x32 is ok for PM2230 from 10 will get 2 voltage
// double
// YD meter started from 10
// addres 13 = Var หารด้วย 10000
// addres 12 = current หารด้วย 10000
// address 11 = voltage A or B
// address 10 = voltage - C
// addres 14 = pf
// soil sensor from address 02
if (getResultMsg(&modbus, result))
{
Serial.println();
float res_dbl = modbus.getResponseBuffer(1);
float value = res_dbl;
String res = "Voltage A : " + String(res_dbl) + " Vac\r\n";
Serial.println(res);
data2 = String(res_dbl);
res_dbl = value - modbus.getResponseBuffer(2) ;
res = "Voltage B : " + String(res_dbl) + " Vac\r\n";
Serial.println(res);
data3 = String(res_dbl);
res_dbl = modbus.getResponseBuffer(3);
res = "Voltage C : " + String(res_dbl) + " \r\n";
Serial.println(res);
data4 = String(res_dbl);
res_dbl = modbus.getResponseBuffer(4);
res = "Frequency : " + String(res_dbl) + " Vac\r\n";
Serial.println(res);
data5 = String(res_dbl);
res_dbl = modbus.getResponseBuffer(5);
res = "Hz : " + String(res_dbl) + " Vac\r\n";
Serial.println(res);
data6 = String(res_dbl);
res_dbl = modbus.getResponseBuffer(6)/100;
res = "Value 26 : " + String(res_dbl) + " Vac\r\n";
Serial.println(res);
data7 = String(res_dbl);
res_dbl = modbus.getResponseBuffer(7)/100;
res = "Power : " + String(res_dbl) + " watt\r\n";
Serial.println(res);
data8 = String(res_dbl);
res_dbl = modbus.getResponseBuffer(8);
res = "Value 28 : " + String(res_dbl) + " Vac\r\n";
Serial.println(res);
//delay(2000);
data9 = String(res_dbl);
}
lastMillis = currentMillis;
}
}
bool getResultMsg(ModbusMaster *node, uint16_t result)
{
String tmpstr2 = "\r\n";
switch (result)
{
case node->ku8MBSuccess:
return true;
break;
case node->ku8MBIllegalFunction:
tmpstr2 += "Illegal Function";
break;
case node->ku8MBIllegalDataAddress:
tmpstr2 += "Illegal Data Address";
break;
case node->ku8MBIllegalDataValue:
tmpstr2 += "Illegal Data Value";
break;
case node->ku8MBSlaveDeviceFailure:
tmpstr2 += "Slave Device Failure";
break;
case node->ku8MBInvalidSlaveID:
tmpstr2 += "Invalid Slave ID";
break;
case node->ku8MBInvalidFunction:
tmpstr2 += "Invalid Function";
break;
case node->ku8MBResponseTimedOut:
tmpstr2 += "Response Timed Out";
break;
case node->ku8MBInvalidCRC:
tmpstr2 += "Invalid CRC";
break;
default:
tmpstr2 += "Unknown error: " + String(result);
break;
}
Serial.println(tmpstr2);
return false;
}
void AM2301_loop() {
// Delay between measurements.
/*
delay(delayMS);
// Get temperature event and print its value.
sensors_event_t event;
dht.temperature().getEvent(&event);
if (isnan(event.temperature)) {
Serial.println("Error reading temperature!");
}
else {
Serial.print("Temperature AM2301 : ");
Serial.print(event.temperature);
Serial.println(" *C");
temp_0 = event.temperature;
data6 = String(temp_0);
}
// Get humidity event and print its value.
dht.humidity().getEvent(&event);
if (isnan(event.relative_humidity)) {
Serial.println("Error reading humidity!");
}
else {
Serial.print("Humidity AM2301 : ");
Serial.print(event.relative_humidity);
Serial.println("%");
humid_0 = event.relative_humidity;
data7 =String(humid_0);
}
*/
}
void serial_loop()
{
Serial.println("Please wait Serial..");
while (a == "") {
Serial2.print("Input1"); // ส่งหัวข้อคำถาม ว่า Question1 ไปยัง Arduino
a = Serial2.readString(); // อ่าน Serial และนำไปเก็บในตัวแปร A
delay(100);
Serial.print(".");
}
Serial.print(" Answer1 ");Serial.println(a);
data8 = String(a);
delay(1000);
a="";
while (a == "") {
Serial2.print("Input2"); // ส่งหัวข้อคำถาม ว่า Question1 ไปยัง Arduino
a = Serial2.readString(); // อ่าน Serial และนำไปเก็บในตัวแปร A
delay(100);
Serial.print(".");
}
Serial.print(" Answer2 ");Serial.println(a);
data9=String(a);
a="";
while (a == "") {
Serial2.print("Input3"); // ส่งหัวข้อคำถาม ว่า Question1 ไปยัง Arduino
a = Serial2.readString(); // อ่าน Serial และนำไปเก็บในตัวแปร A
delay(100);
Serial.print(".");
}
Serial.print(" Answer3 ");Serial.println(a);
data6=String(a);
a="";
while (a == "") {
Serial2.print("Input4"); // ส่งหัวข้อคำถาม ว่า Question1 ไปยัง Arduino
a = Serial2.readString(); // อ่าน Serial และนำไปเก็บในตัวแปร A
delay(100);
Serial.print(".");
}
Serial.print(" Answer4 ");Serial.println(a);
data7 = String(a);
}
int value = 0;
void Forward_loop()
{
delay(5000);
// scanSensor_Box_Temperature();
//data1 = vTemperature;
++value;
data1 = data1 ;
data2 = data2 ;
Serial.print("connecting to ");
Serial.println(host);
// Use WiFiClient class to create TCP connections
WiFiClient client;
const int httpPort = 80;
if (!client.connect(host, httpPort)) {
Serial.println("connection failed");
return;
}
// We now create a URI for the request
String url = "/api/insertData?device_id=" + String(iddevice)+"&code="+String(ccode)+"&data1=" +String(data1) +"&data2="
+ String(data2)+"&data3=" +String(data3)+"&data4=" +String(data4)+"&data5=" +String(data5)
+"&data6=" +String(data6)+"&data7=" +String(data7)+"&data8=" +String(data8)+"&data9=" +String(data9)
+"&data10=" +String(data10)+"&data11=" +String(data11)+"&data12=" +String(data12)+"&data13=" +String(data13)
+"&data14=" +String(data14)+"&data15=" +String(data15)+"&data16=" +String(data16)+"&data17=" +String(data17)
+"&data18=" +String(data18)+"&data19=" +String(data19)+"&data20=" +String(data20);
Serial.print("Requesting URL: ");
Serial.println(url);
// This will send the request to the server
client.print(String("GET ") + url + " HTTP/1.1\r\n" +
"Host: " + host + "\r\n" +
"Connection: close\r\n\r\n");
unsigned long timeout = millis();
while (client.available() == 0) {
if (millis() - timeout > 5000) {
Serial.println(">>> Client Timeout !");
client.stop();
return;
}
}
// Read all the lines of the reply from server and print them to Serial
while(client.available()) {
String line = client.readStringUntil('\r');
//Serial.print(line);
}
Serial.println();
Serial.println("closing connection");
delay(5000);
data1="0";
data2="0";
data3="0";
data4="0";
data5="0";
data6="0";
}
//====
//====
void splint_string(char sz[]){ // สร้างฟังชันต์ชื่อ splint_string กำหนดตัวแปรนำเข้าชื่อ sz ชนิด char แบบอาเรย์
char *p = sz; // สร้างตัวแปรชื่อ p ชนิด Pointer มีค่าเท่ากับ sz
char *str; // สร้างตัวแปรชื่อ str ชนิด Pointer
int counter = 0; // สร้างตัวแปรชื่อ counter ชนิด int สำหรับทำการนับครั้งที่ตัด
while ((str = strtok_r(p, ",", &p)) != NULL){ // วนทำลูป while ซ้ำ โดยเรียกฟังชันต์ strtok_r() โดยทำการตัดค่าใน p เมื่อเจอเครื่องหมาย','
// Serial.print(counter + String(". ")); // แสดงผลจำนวนครั้งที่ตัด
// Serial.println(str); // แสดงผลค่าที่ตัดได้
counter++;
if (counter ==1){ccode = str;}
if (counter ==2){iddevice = str;}
if (counter ==3){data1 = str;}
if (counter ==4){data2 = str;}
if (counter ==5){data3 = str;}
if (counter ==6){data4 = str;}
if (counter ==7){data5 = str;}
if (counter ==8){data6 = str;}
}
counter = 0; // เคลียร์ค่าใน counter เป็น 0
}
void dataread_loop()
{
//char charBuf[100];
str = packet;
str.toCharArray(charBuf, 100); // คัดลอกอักขระของชุดอักขระไปยังตัวแปร charBuf
splint_string(charBuf); // เรียกใช้งานฟังชั่น Splint String
//delay(1000);
}
อาจจะมีโค้ดเซนเซอร์แถมลงไปเยอะหน่อยนะครับ ก็ทะยอยเอาออกหากไม่ใช้
มาดูฝั่ง Nano ก็เดิมๆ สำหรับการมาต่อ Series
#include <EEPROM.h>
#include <SoftwareSerial.h>
SoftwareSerial chat(5, 4); // RX 11 , TX 10
//////// AM2302
#include <math.h>
#include <Adafruit_Sensor.h>
#include <DHT.h> // กรณีนี้ต้องใช้คู่กันกับ DHT_U.h
#include <DHT_U.h>
#define DHTPIN 10 // Pin which is connected to the DHT sensor.
// Uncomment the type of sensor in use:
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302)
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
DHT_Unified dht(DHTPIN, DHTTYPE);
uint32_t delayMS;
////////
int i;
int sensorValue;
float rainmm ;
float dustDensity = 35;
String response ="0";
String response_c = "0";
String a ;
float temp_0 = 0;
float tempF_0 = 0;
float humid_0 = 0;
float vHumidity = 0;
float vTemperature = 0;
String data1 ;
String data2 ; // standard
float data3 = 0;
float data4 = 0;
float data5 = 0;
float data6 = 0;
float temperatureC = 0;
float temperatureF = 0;
int counter = 1;
int sentcount = 0;
//////////////////////////////
void AM2302_setup() {
dht.begin();
Serial.println("DHTxx Unified Sensor Example");
// Print temperature sensor details.
sensor_t sensor;
dht.temperature().getSensor(&sensor);
Serial.println("------------------------------------");
Serial.println("Temperature");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" *C");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" *C");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" *C");
Serial.println("------------------------------------");
// Print humidity sensor details.
dht.humidity().getSensor(&sensor);
Serial.println("------------------------------------");
Serial.println("Humidity");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println("%");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println("%");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println("%");
Serial.println("------------------------------------");
// Set delay between sensor readings based on sensor details.
delayMS = sensor.min_delay / 1000;
}
void setup() {
Serial.begin(9600);
chat.begin(9600);
}
void loop() {
AM2302_loop();
input1_loop();
//input2_loop();
if (chat.readString()){
// chat.print(1);
if(chat.readString()== "Input1"){ //มีการถามคำถาม Question1 ส่งข้อมูลตัวแปร a ออกไป
chat.print(String(sensorValue));
}
if(chat.readString()== "Input2"){ //มีการถามคำถาม Question2 ส่งข้อมูลตัวแปร b ออกไป
chat.print(String(rainmm));
}
if(chat.readString()== "Input3"){ //มีการถามคำถาม Question1 ส่งข้อมูลตัวแปร a ออกไป
chat.print(String(data3));
}
if(chat.readString()== "Input4"){ //มีการถามคำถาม Question2 ส่งข้อมูลตัวแปร b ออกไป
chat.print(String(data4));
}
Serial.print("Send = ");
Serial.println(i);
}
i++;
delay(1000);
}
void input1_loop() {
// read the value from the sensor:
sensorValue = analogRead(A0);
//Serial.print(" Analog read := ");Serial.println(sensorValue);
if (sensorValue > 580) {
rainmm = 80.437-0.0977*sensorValue;
}
else {
if (sensorValue > 509) {
rainmm = 443.6-0.717*sensorValue;
}
else
{
if (sensorValue > 466) {
rainmm = 903.74-1.6059*sensorValue;
}
else{
rainmm = 770.06-1.3314*sensorValue;
}
}
}
delay(1000);
//answer=String(255);
Serial.print("A0 signal : ");Serial.println(sensorValue);
Serial.print("Rain mm : ");Serial.println(rainmm);
}
void input2_loop() {
// read the value from the sensor:
sensorValue = analogRead(A0);
//Serial.print(" Analog read := ");Serial.println(sensorValue);
if (sensorValue > 580) {
rainmm = 80.437-0.0977*sensorValue;
}
else {
if (sensorValue > 509) {
rainmm = 443.6-0.717*sensorValue;
}
else
{
if (sensorValue > 466) {
rainmm = 903.74-1.6059*sensorValue;
}
else{
rainmm = 770.06-1.3314*sensorValue;
}
}
}
delay(1000);
//answer=String(255);
}
void AM2302_loop() {
// Delay between measurements.
delay(delayMS);
// Get temperature event and print its value.
sensors_event_t event;
dht.temperature().getEvent(&event);
if (isnan(event.temperature)) {
Serial.println("Error reading temperature!");
}
else {
Serial.print("Temperature: ");
Serial.print(event.temperature);
Serial.println(" *C");
temp_0 = event.temperature;
data3 = temp_0;
}
// Get humidity event and print its value.
dht.humidity().getEvent(&event);
if (isnan(event.relative_humidity)) {
Serial.println("Error reading humidity!");
}
else {
Serial.print("Humidity: ");
Serial.print(event.relative_humidity);
Serial.println("%");
humid_0 = event.relative_humidity;
data4 = humid_0;
}
}
Nano ก็เช่นกัน มีของแถมให้เยอะเลย